
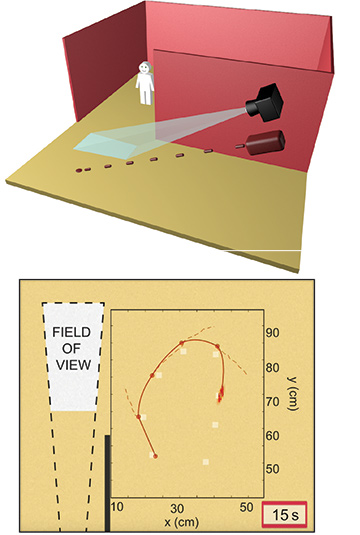
 (Top) An object, hidden from the camera by a wall, is illuminated by the scatter signal from a laser beam. (Bottom) The temporal and spatial information of the return scatter, recorded by the camera, is used to retrieve the position of the hidden object. The white squares show actual positions of the object; the line shows the trajectory, tracked in real-time.
(Top) An object, hidden from the camera by a wall, is illuminated by the scatter signal from a laser beam. (Bottom) The temporal and spatial information of the return scatter, recorded by the camera, is used to retrieve the position of the hidden object. The white squares show actual positions of the object; the line shows the trajectory, tracked in real-time.
One of the more remarkable successes of computational imaging is the ability to detect objects that are hidden from view by a wall or an obstacle. Although different techniques can provide impressive 3-D reconstructions of a hidden object, detecting an object out of the line of sight in real time with a portable system remains a major challenge.1,2 We recently presented a technique, based on single-photon counting, that can locate the position of an object hidden around a corner in a few seconds’ acquisition time, and that thus allows us to track its position as it is moving.3
The technique relies on a single-photon avalanche diode (SPAD) camera and a femtosecond pulsed laser. In our proof-of-principle experiment, we place a 30-cm-high target out of sight of the camera. We direct the laser pulses at the floor beyond the edge of the obstacle; the pulses then scatter and reach the hidden object, which in turn rescatters the light back into the field of view of the camera.
The SPAD not only records very low light intensities but also has picosecond temporal resolution.4 We can therefore record the light signal scattered back from the object as it sweeps across the floor. With the recorded temporal and spatial information, we can infer the position of the hidden object with a relatively simple retrieval algorithm.3
We demonstrated that we could locate an object hidden a meter away from the camera with three-second-long acquisitions as the object is moving. With the acquired data, we can update the location of the object every three seconds, and interpolate its position between measurements using a standard tracking algorithm.
This compact and portable technology has the potential for use outside of the lab in real-world scenarios. An analysis of our technique’s sensitivity and signal-to-noise characteristics shows that it can be extended to detect hidden people at standoff distances of tens of meters, and research in this direction is underway. This technique could, therefore, become an invaluable in situations such as rescue missions, surveillance and autonomous driving.
Researchers
Genevieve Gariepy, Francesco Tonolini, Jonathan Leach and Daniele Faccio, Heriot-Watt University, Edinburgh, U.K.
Robert Henderson, University of Edinburgh, Edinburgh, U.K.
References
1. A.Velten et al. Nat. Commun. 3, 745 (2012).
2. O. Katz et al. Nat. Photon. 8, 784 (2014).
3. G.Gariepy et al. Nat. Photon. 10, 23 (2016).
4. G. Gariepy et al. Nat. Commun. 6, 6021 (2015).